只管人形呆板人的观点源于模拟人类活动的目的,但现有体系在活动优雅性跟效力上仍与人类存在差距。形成这一差距的要害起因在于以后人形呆板人在活动学、能源学跟驱动特征方面与人类存在差别。本研讨旨在经由过程计划与人类特BET356官网在线登录点高度类似的优化人形呆板人来缩小这一差距。为此,咱们构建了具体的驱动组件机电建模框架,并基于该模子对呆板人驱动体系停止多目的优化(目的函数基于后期研讨结果)。这一进程不只实现了高效力驱动体系的计划,欧洲杯竞猜app还优化了却构部件的品质与惯性散布,使其更濒临人类。经由过程该计划流程开辟的人形呆板人米特拉(Mithra),开端测试标明其在类人活动学跟能源学特征方面到达计划目的,并具有爬楼梯、深蹲跟奔驰等义务所需的驱动才能。本文援用地点:弁言 人类活动力学经由数百万年的退化,已能在庞杂地形上实现稳固、和婉且自顺应的活动。受此启示,年夜少数腿式呆板人经由过程模拟人类下肢构造计划机器腿,以顺应人类情况并增进无效交互皇冠体育官方网站。比年来,人形呆板人已被利用于仓储物流、军事义务、救济举动跟医疗帮助等范畴。在双足呆板人拟人化腿部计划中,需在机动性、稳固性跟能效之间停止衡量。基于McGeer主动步行机的Ranger跟Denise实现了高能效活动,但就义了鲁棒性跟多义务才能。而Atlas跟ASIMO等呆板人虽能在实在情况中展示杰出的活动才能,但其运输本钱明显高于生物体系。MIT Cheetah、ATRIAS等呆板人则实验经由过程高扭矩、可回驱的驱动体系均衡多义务才能与主动能源学特征。但是,这些呆板人的腿部构造与人类存在明显差别,招致其无奈完整复现人类活动的高阶特点,如枢纽和谐跟摆动相的腿部惯性应用。本研讨在后期提出的矢状面拟人化腿部优化框架基本上,将其扩大至三维空间,并具体论述了该框架在新型人形呆板人平台Mithra开辟中的利用。基于人类均匀数据跟尺度行走/奔驰轨迹,界说了Mithra的尺寸、枢纽运动度、活动学及驱动机能指标。经由过程仿真与试验验证了计划的无效性。双足呆板人计划近况机器构造 腿部活动学构造是人形呆板人的中心特点。ASIMO、HUBO等呆板人采取全拟人化下肢构造,平日包括3自在度髋枢纽、1自在度膝枢纽跟2自在度踝枢纽。这种六自在度模子可能无效模仿人类下肢的重要活动形式,并便于逆活动学求解。
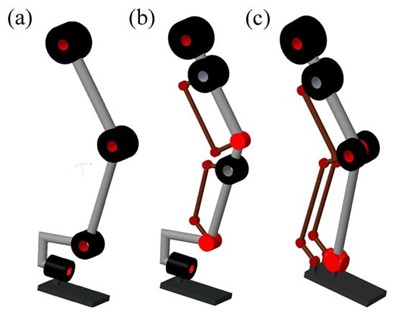
传统串行枢纽计划(图1a)虽简化了机器与把持,但会增添腿部惯性,影响静态机能。为下降惯性,驱动单位常经由过程连杆或皮带传动实现离轴安排(图1b)。WALK-MAN等呆板人则采取曲柄连杆机构(图1c),经由过程机器增益下降驱动扭矩需要,晋升腿部刚度。并联机构在踝枢纽的利用可进一步优化构造紧凑性。仿生计划经由过程双枢纽驱动跟张拉团体构造模仿人类肌肉骨骼体系,可下降把持带宽需要并晋升能量效力。但是,多驱动协同把持的庞杂性限度了实在际利用。驱念头制 电动驱动因把持轻便、能量传输高效成为主流抉择。高加速比传动体系可晋升扭矩密度,但会影响情况顺应性跟打击鲁棒性。串联弹性驱动(SEA)虽改良了力把持机能,但下降了驱动带宽。跟着无刷直流电机(BLDC)技巧的开展,直接驱动观点逐步遍及。MIT Cheetah的准直接驱动(QDD)体系经由过程枢纽力把持实现了静态活动,但存在电机体积年夜、高速扭矩受限等成绩。液压驱动虽具有高功率密度,但能效低、体系庞杂,限度了实在际利用。米特拉观点计划基于上述剖析,咱们开辟了具有以下目的的人形呆板人Mithra: - 体型参数:身高1.75m,体重75kg(濒临成年男性均匀值) - 活动才能:六自在度下肢构造,枢纽运动度与人类相称 - 能源学特征:肢体品质与惯性散布濒临人类 - 义务才能:3m/s奔驰、爬楼梯、深蹲等 - 构造简化:刚性躯干计划(无头部及手臂)
